
مزامنة مع الاعلان عن اعتماد المغرب للجيل الرابع 4G فان الجميع أقبل على هذه الخدمة الجديدة و ذلك انبهارا بسرعة هذا الاتصال الخيالي . اذ يعتبر أسرع اتصال في المغرب لحدود كتابة هذه التدوينة ، لذلك فان الكل يريد الاشتراك و الحصول على اتصال 4G في هاتفه الشخصي و لكن ما لا يعلمه البعض ان هواتفهم قد تكون لا تدعم الـ4G و بالتالي فان امر شراء البطاقة سيكون بمثابة ضياع في هذه الحالة ، لذلك و مع مدونة المحترف سوف نشرح لكم طريقة بسيطة جدا من خلاللها يمكنك أن تفصح هاتفك و تتعرف ان كان يتوفر هذا الأخير على خاصية الجيل الرابع 4G ام لا !
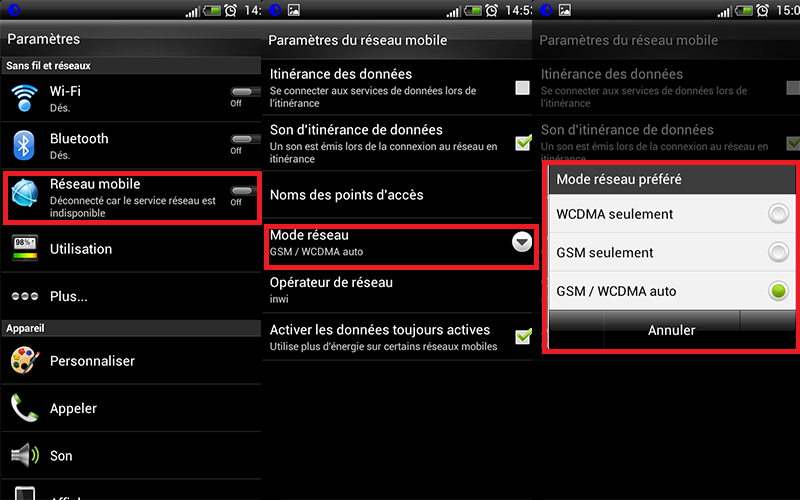
فكما ترى معي فان هاتفي لا يتوفر على اتصال 4G و الدليل على ذلك هو انعدام خيار LTE الكلمة المختصرة للـLong Term Evolution و التي توحي بانه هناك امكانية لتشغيل اتصال 4G على الهاتف ، يعني في نوع الاتصال ان وجدت 4G او LTE فانه لديك خاصية اتصال الجيل الرابع و بامكانك تشغيله بدون مشاكل.
